| ENG RUS | Timus Online Judge |

1703. Рука роботаОграничение времени: 1.0 секунды Ограничение памяти: 64 МБ 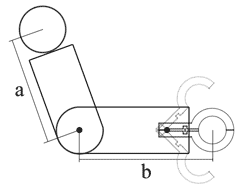 Рука робота устроена по тому же принципу, что и человеческая. Она состоит
из плеча и предплечья. Плечевой сегмент закреплён в плечевом суставе так,
что может вращаться в этом суставе в любом направлении. Предплечевой
сегмент соединяется с плечевым в локтевом суставе. Предплечье может
поворачиваться относительно плеча вокруг оси, проходящей через локтевой
сустав и перпендикулярной плечу и предплечью. Угол сгиба руки в локтевом
суставе не может быть острым. На конце предплечевого сегмента имеется
клешня, состоящая из двух одинаковых частей, которые могут смыкаться и
размыкаться. В момент, когда клешня полностью сомкнута, она может держать
цилиндр единичного диаметра. В таком положении ось цилиндра будет
параллельна оси локтевого сустава.
Робот увидел рядом с собой цилиндрический поручень бесконечной длины и
единичного диаметра. Он разомкнул клешню и хочет схватиться за этот
поручень, но так, чтобы клешня могла полностью сомкнуться. Определите,
какое положение должна принять рука робота, чтобы он мог сделать это.
Исходные данныеВ первой строке указаны числа a и b — длина соответственно плечевого
и предплечевого сегментов руки. Во второй и третьей строках указаны координаты двух различных точек,
лежащих на оси поручня. Координаты даны в системе отсчёта с центром в плечевом суставе.
Поручень не проходит сквозь плечевой сустав. Все числа целые и не превышают по модулю 100;
a, b ≥ 4.
Толщиной плеча и предплечья следует пренебречь.
РезультатЕсли не существует положения руки робота, при которой он может сомкнуть клешню на поручне, выведите «No solution.»
Иначе выведите координаты локтевого сустава и угол сгиба руки в нём в радианах с максимально возможной точностью. Значение
угла должно лежать в диапазоне [π/2, π]. Если существует несколько вариантов решения, выведите любой из них.
Примеры
Автор задачи: Павел Атнашев Источник задачи: XIII чемпионат Урала по спортивному программированию, 4 апреля 2009 г. Метки: геометрия |